




关于2023年中国大学生机械工程创新创意大赛智能精密装配大赛报名通知
 收藏
收藏
一、赛事简介
全国大学生智能精密装配大赛(以下简称“装配大赛”)由中国机械工程学会主办,是中国大学生机械工程创新创意大赛8项专业赛事之一,旨在搭建智能装配技术交流平台,推动智能装配先进理念及技术应用,培养智能装配人才创新及实践能力,激发广大机械工程及其相关交叉领域大学生兴趣和潜能,助推智能精密装配技术的不断发展和进步,实现我国从制造大国向制造强国的飞跃。
二、竞赛内容
2023年中国大学生机械工程创新创意大赛智能精密装配大赛,本赛事针对学科和专业领域特点,设置装配过程精确数字孪生建模、图像识别与精确对准技术、精密柔性抓取技术和精密螺纹连接技术等智能装配关键技术相关赛项,并且以解决军民用装配关联短板技术为出发点,综合考察装配技术研究领域大学生的创新思维能力、创新设计力和创新实践能力。
选题背景:随着人工智能的发展,在机械领域充斥了大量的智能化设备,在各类智能精密工程实践中,对于如何提高精确性,提高智能性,仍然存在着一些难以攻克的问题,极大地影响工程进度和质量。亟需有针对性地设计在各种特殊工况下使用的各类特种机械,或机器人,作为特种辅助工具又快又好又精确地完成预定工作任务。
内容说明:通过调研,针对某类工程的特点自行提出设计需求,明确设计功能目标,完成一种特殊工况下使用的特种机械或机器人设计。
本科赛项设手动组和自动组二个类别。两组设计方案应满足以下要求a-d 项
内 容 | 要 求 |
a专用属性 | 面向某种工程实际存在的机械装置与作业对象的对接不畅问题,设计针对其中完成某特定任务的机械或机器人。 |
b功能实现 | (1)完成某特定任务的机械或机器人能够进入工作环境、接近工作对象、完成工作任务。 (2)“准确、可靠、无损害”原则——要求定位准确,完成预定任务可靠,且不对工作对象造成损害。 (3)功能齐全、动作准确、可靠,具有较高的工作效率。 |
c机器类型 | (1)限于小型设备。 (2)可以是整体式设备,具有行走、机架固定、各轴移动(旋转)、各类任务功能。设备在工作场景内穿行时,须满足安全条件(含:人员安全、不损坏工作对象等)。 (3)可以是整台设备中的主体部件(机械或机器人)。 |
d创新要素 | (1)与同类原理机械的比较,在运动原理、机构设计方面有创新; (2)与同类原理机械的比较,在材料选取、结构设计方面有创新。 |
零件自动识别与安装任务书
考察内容:装配基础知识、机器人操作基础知识、单目视觉、机械臂位姿控制、人机协作、机械臂抓取
三、任务概述
参赛者需要设计算法,编制程序,控制机器人自动完成零件识别与安装。机器人需要利用单目相机,识别出安装区给定标志物的形状,并在零件区自动识别相应零件,识别出零件位置后抓取零件,将其安装到安装区指定位置。机器人与安装区、零件区的相对位置如图所示:
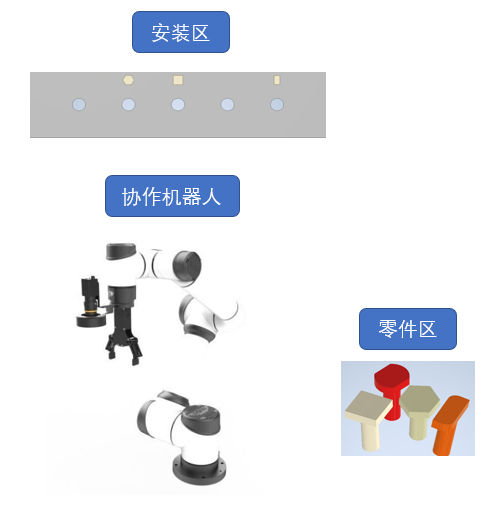
图1 比赛设备相对位置示意图
四、任务细则
比赛的实际运行场地在隔振光学平台上,协作机器人(挂载单目相机与机械夹爪)与设计的标准多孔板安装在光学平台上(其中:机器人的位置标定、相机标定参数以及多孔板的安装位置会在赛前给出),标准多孔板设计有五个孔,孔的上方可随机放置不同形状的标志物,如图2所示。
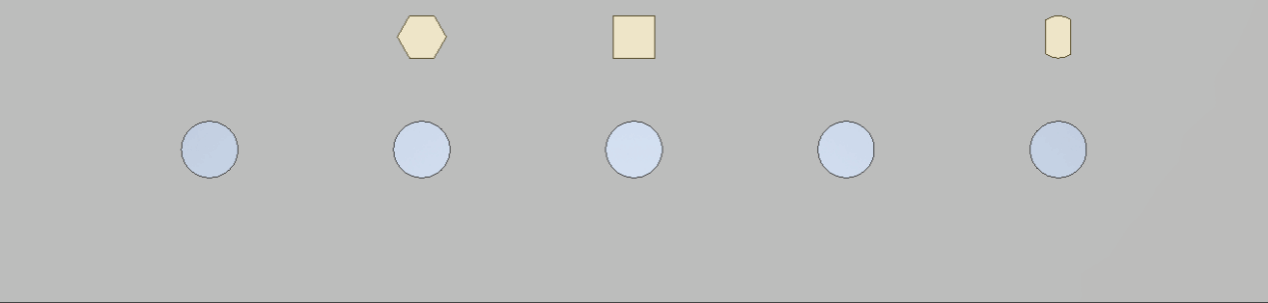
图2 多孔板与标志物
四种形状的零件随机放置在零件区且存在不同程度的倾斜。参赛者需要编制程序,使得机器人能够识别出安装区标志物的形状,并在零件区(图3)找出对应形状的零件,依次抓取并安装至安装区标志物对应的孔中,由准确识别与安装零件数量、安装完成时间来进行参赛者的打分。

图3 零件区
五、初赛比赛流程
5.1赛前准备
(1)参赛各队参加机器人的使用培训,掌握机器人的操作方法,掌握单目视觉相机相关知识,及机器人仿真软件。
(2)能够自主编制路径规划,识别抓取等程序。
5.2提交材料
(1)技术方案报告,评分要点如下:
(2)答辩PPT,评分要点如下:
(3)仿真软件视频,评分要点如下:
序 号 | 评 分 要 点 |
1 | 机器人模拟运动仿真 |
2 | 运动仿真软件与视觉软件的信息交互 |
3 | 机器人运动仿真与图像处理算法的讲解 |
4 | 安装过程的可行性,创新性,合理性 |
5 | 讲解思路清晰,语言通顺 |
六、初赛相关事宜说明
1. 选手提交技术方案报告、PPT以及仿真演示视频。技术方案报告、PPT与仿真演示视频分值各占40%、20%、40%。
2. 组委会组织专家对参赛选手提交的技术方案报告与PPT进行打分。
3. 参赛选手提交答辩PPT,时间要求5-8分钟,初赛提交带有讲解旁白的MP4视频文件。
4. 针对任务,通过大赛提供的仿真软件完成零件自动识别与安装任务,并提交相关仿真视频。
5. 对于仿真视频,根据如下相关软件进行运动仿真与视觉算法处理,并制作视频。视频需要带有计时器,要求不超过十分钟。
序号 | 软件名称 | 软件版本 | 备 注 |
1 | VMware Workstation | V14.0以上 | 机器人仿真软件环境 |
2 | AUBOPE | V4.5 | 机器人仿真软件 |
3 | MVS | V3.0 | 实体相机设置软件(选配) |
4 | Vision Master | V4.0 | 视觉算法平台 |
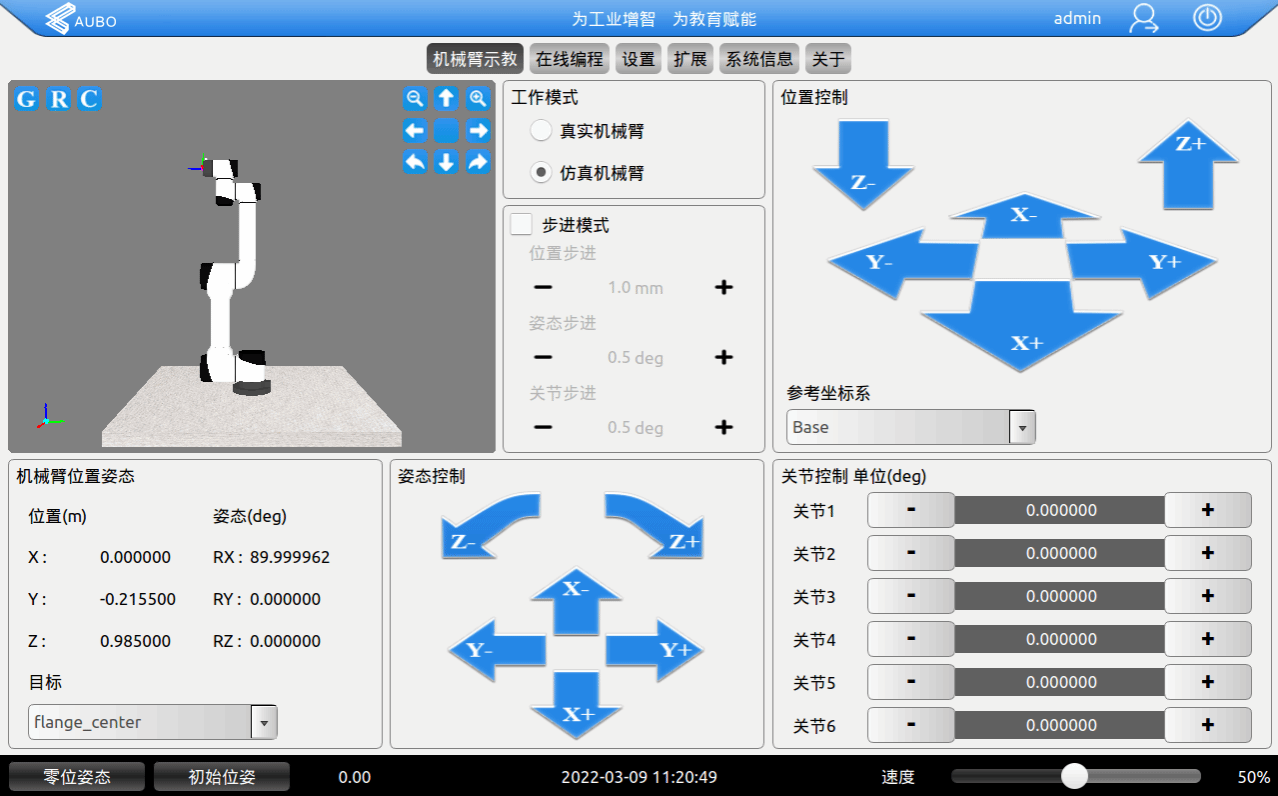
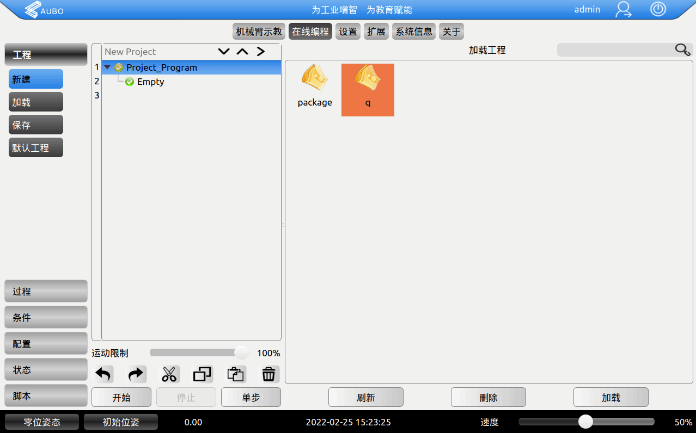
(1)通过AUBOPE仿真软件,对任务进行机器程序逻辑编写 ,机器人运行点位示教,机器人和视觉进行通讯,获取位置变量,机器人进行任务动作,软件如图4所示。
评分要点:3D虚拟机械臂能模拟任务运动动作,如识别过程、安装过程等移动动作,可以显示通讯获取的视觉信息变量等,参赛选手通过对编写逻辑和内容进行讲解并录制视频,根据步骤进行评分。
![]()
图4 AUBOPE软件界面
(2)通过Vision Master软件,进行视觉识别流程搭建,使用大赛官方提供的本地图片,进行手眼标定的过程演示,标志物、安装孔以及零件的识别,位置信息的发送等过程。
评分要点:能够进行功能演示,模块参数具体介绍,分步骤给分。
七、参赛条件与方式
1.参赛条件:以小组的方式,每个参赛队学生人数不得多于5人,指导教师不多于3人。参赛队由所在学校统一向组委会报名。
2.参赛方式:参赛队学生自接到大赛通知后,即可按大赛主题和内容的要求进行准备,并联系指导教师报名参赛。
注意:报名截止日期为2023年5月31日!请有意向同学务必在截止日期(含5月31日)之前先将报名表发送给联系老师邮箱,审核通过后请在校创新创业平台(https://cxcy.lnpu.edu.cn)完成报名和提交比赛材料。
八、竞赛承办单位及联系人
承办单位:机械工程学院
联系人:刘长福
竞赛QQ群:197344269
邮箱:liuchangfu@163.com
附件1:2023年中国大学生机械工程创新创意大赛机械创意赛道报名表
附件2:2023年中国大学生机械工程创新创意大赛创意赛道校内报名汇总表
创新创业学院
机械工程学院
2023年5月15号
元志愿陪伴各位小伙伴度过高考
【高考升学群】
群内不定期分享高考升学资讯、教育政策
高考系列直播、择校指南、专业推荐介绍
高考各科提分必备技巧、学习资料共享等
长按识别下方二维码
添加助教老师回复“高考”即可入群
★微信搜索小程序:元志愿
【找大学】院校信息,985/211/双一流院校等
【选专业】专业信息,清晰了解专业具体情况
【高考选科】三个维度,帮助考生自主搭配学科
【学业管理】学业剖析,定目标找差距圆梦大学
【一键查询】输入分数,一键查看能上的大学
【智能填报】志愿神器,AI大数据+冲稳保策略
【学业评测】免费测评,五大维度快速认知自我
【直播课堂】填报技巧,支持无限次重复回放
【专业指导】量身定制,不浪费高考每一分
【高考资讯】高招政策,高考实时资讯全掌握
【志愿客服】在线解答,高考咨询一键接招
免责声明:文章部分文字内容来源于网络,如有侵权,请联系删除,版权归原作者所有。
